Robot Guide: Social Robot based Intelligent Navigation of Visually Impaired Person in Human Aware Indoor Environment
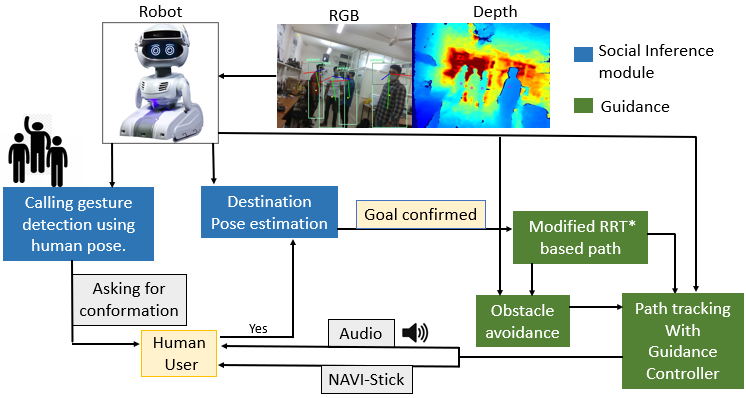
This research aims to equip a social robot to assist visually impaired individuals to navigate and better perceive their surroundings to socially engage with people. The work focuses on enabling the visually impaired user to identify one’s destination in a social scenario and move independently towards it. A novel Group Aware Pose Estimation(GAPE) algorithm, to identify a position for the new group member to join is implemented. A modified RRT* for path planning, an obstacle avoidance framework and follower aware controller is used to guide the user towards the goal. Multimodal feedback is provided through audio and custom-designed hand-held direction indicator ”NAVI-Stick”. The results obtained for the proposed GAPE algorithm works in real-time with pose metric(based on Field of view) evaluated to be over 90% for groups less than 6 members. Trials were conducted for guiding a blindfolded person towards the desired human group. The maximum Euclidean distance between user’s final position and final goal position for N=15 trials is 0.98m. The average Euclidean distance-based positional error of the follower aware controller is 0.0943m
--> View on GitHub View PDF